SIGGRAPH 2018 Trip Report

Many of us on the team just got back from this year’s Association of Computer Machinery (ACM)Special Interest Group in Graphics (SIGGRAPH) conference. SIGGRAPH for us is always exhausting but simultaneously exhilarating and enormously rewarding. This year’s SIGGRAPH was in Vancouver, Canada.

We started our week with the WebGL dinner organized by Mauricio Vives, with developers from Esri, Khronos, Toyota Research Institute, and Google. Many attendees were people some of us had only interacted with on email and github, so it was nice to finally meet in person. Others were familiar faces by the end of the week, thanks to other sessions we attended and hosted.
Carto BOF

Our first formal presentation for the week was also Gabby’s first SIGGRAPH talk ever, and our sixth time presenting at the Cartographic Visualization (Carto) Birds-of-a-Feather (BOF) session. The Carto BOF is always a great time for us to see the latest and greatest in 3D geospatial outside Cesium. It’s also a great opportunity to summarize Cesium’s capabilities, new features, and ongoing improvements for prospective users, as well as showcase work from existing users.
Cesium BOF

Gabby later delivered Cesium’s State of the Union address at our Cesium BOF, now in its sixth year, highlighting our enhancements in terrain, 3D Tiles, 3D Models, performance, and visual quality over the past year.
We also had numerous presentations demonstrating increased interest in massive data capabilities, both in open-source Cesium and using the ecosystem of tools and standards surrounding it. A recording of the full event is available here on YouTube.
Shehzan presented A-Terrain on behalf of Mozilla’s A-Frame team, demonstrating how A-Frame draws data from Cesium ion for augmented reality.

Esri’s Tamrat Belayneh gave an overview of Esri’s Indexed 3D Scene (I3S) format and demonstrated early work on interoperability with 3D Tiles.
Safe Software’s Dmitri Bagh gave a demo of FME’s ability to push geospatial data to Cesium using 3D Tiles.

Finally, Vangelis Kokkevis showed off how Toyota Research Institute is using Cesium to view autonomous driving data and aid in autonomous driving research.


Vangelis also presented at the first-ever Autonomous Driving Simulation and Visualization BOF, which he co-organized with Patrick. This event featured speakers from Zoox, Unity, Uber, and various university research groups. We’re going to need a bigger room next time!
Khronos Day
Wednesday at SIGGRAPH is known to our team as “Khronos Day” thanks to the day-long series of Khronos-sponsored BOFs.
Patrick moderated the glTF BOF (viewable here), which included updates from Facebook and Microsoft on increased glTF support across their platforms.
Other highlights include Alex Wood and Ed Mackey’s demonstration of glTF 2.0 in AGI’s Systems Toolkit (STK), an update by Khronos’s Mark Callow on progress towards universal texture compression, and a presentation from IKEA’s Martin Enthed on how IKEA is using glTF.
I also took the Pharsalia Cabin point cloud from Trimble for a spin on Cesium during the WebGL BOF.

Later that day we brought back the Toyota Research Institute demo for our table at Khronos’s after party. It drew a lot of attention, and not just from autonomous driving attendants —Gabby and Shehzan barely got a chance to breathe!


Wrapping things up on Thursday was the second-ever glTF Ecosystem Forum, organized by Neil Trevett and moderated by Patrick. This session brought about numerous lively discussions on possible future features and extensions for glTF, such as built-in level-of-detail schemes, even richer materials borrowing from NVIDIA’s Material Definition Language, and again, universal texture compression. Hearing what other people in the ecosystem want out of glTF was an enlightening affirmation of the format’s bright future, and the Khronos 3D Formats Working Group clearly has their work cut out for them over the next year.
TL;DR
SIGGRAPH is always a wonderful time to see what the wider 3D-on-the-web and 3D GIS community is doing, and it’s always a fun time to showcase the cool stuff our users, collaborators, and teammates have been building. I’ll look forward to next year’s SIGGRAPH once we’ve all had a chance to catch a breath.
In the meantime, if you’re building something amazing on Cesium, consider this an open call for things to showcase, either here on the blog or in our sessions at future conferences and next year’s SIGGRAPH.
Here’s a quick summary of recording links and slides from throughout this post.
- Carto BOF Slides
- Cesium BOF Slides
- Cesium BOF recording
- Khronos BOF glTF session recording
- Khronos BOF WebGL session recording
- glTF Ecosystem Forum Slides
For more general SIGGRAPH catchup, check out Stephen Hill’s list of SIGGRAPH 2018 links.
Bonus for anyone who read all the way to the end
We’ve all spent a lot of time poking around the Cesium World Terrain’s virtual Grand Canyon, so it was a pleasant surprise to see it in person on the way home, even from cruising altitude:
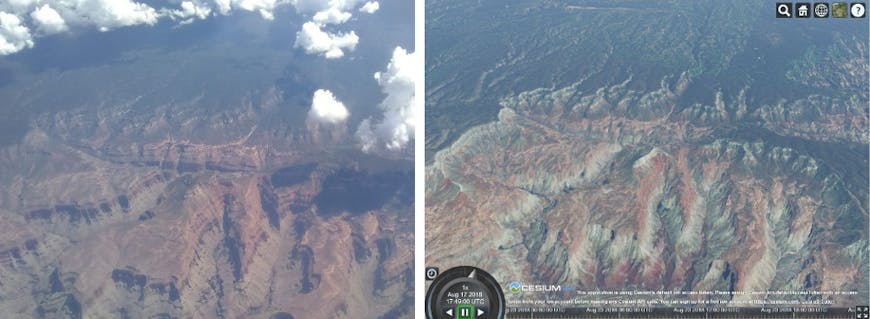
Here’s a similar view on Sandcastle. Note that the Cesium screenshot is a sneak peak at what Cesium will be capable of with our upcoming HDR features. Stay tuned!