Milestones Leading to Cesium 1.0
As we get close to Cesium 1.0, let's take a quick tour of the 3+ year journey that brought us here.
March 2011 - WebGL 1.0: At the Game Developers Conference, Khronos released the WebGL 1.0 spec. This brought plugin-free hardware-accelerated 3D graphics to modern web browsers, making Cesium possible.

March 2011 - First commit: Cesium was started by Analytical Graphics, Inc. (AGI) to fulfill their customers' needs for a thin-client cross-platform virtual globe. AGI made the first Cesium commit (then named Geoscope) to their internal Perforce server. This was little more than the original vector and cartographic types and Jasmine unit tests. These 73 tests have grown to over 5,500 today.
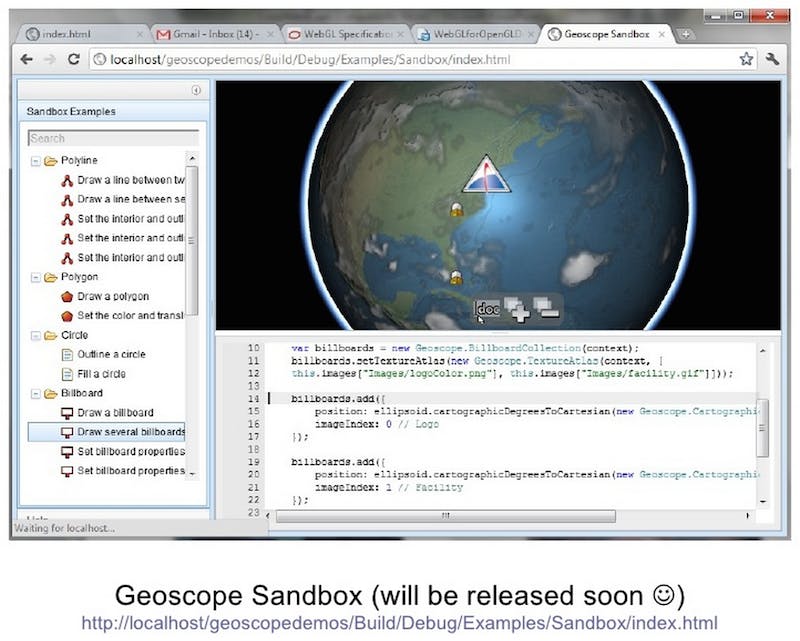
September 2011 - Cesium "leaked": In a guest lecture, WebGL: GPU acceleration for the open web, at the University of Pennsylvania, we showed the first public Cesium demo featuring Sandbox, the precursor to Sandcastle. Although this wasn't actively publicized, it caught the attention of open-source geospatial developers.
March 2012 - First presentation: At WebGL Camp Orlando, we gave the first full presentation on Cesium: WebGL for Dynamic Virtual Globes(video). This introduced Columbus View and CZML, a JSON schema for temporal visualization (then called CZM). We also announced that Cesium would be open-source.
April 2012 - Cesium released as open-source: The first post to the Cesium forum announced that Cesium was now open-source on GitHub. This initial release was a useful API, but quite limited compared to today's Cesium. It supported a globe with streaming high-resolution imagery, basic camera navigation, and primitives like billboards, labels, polylines, and polygons. It did not contain several major features that we have today, like terrain, 3D models, CZML, and widgets.
August 2012 - CZML and widgets: Cesium b7 was released with initial support for CZML and widgets, including the timeline widget.

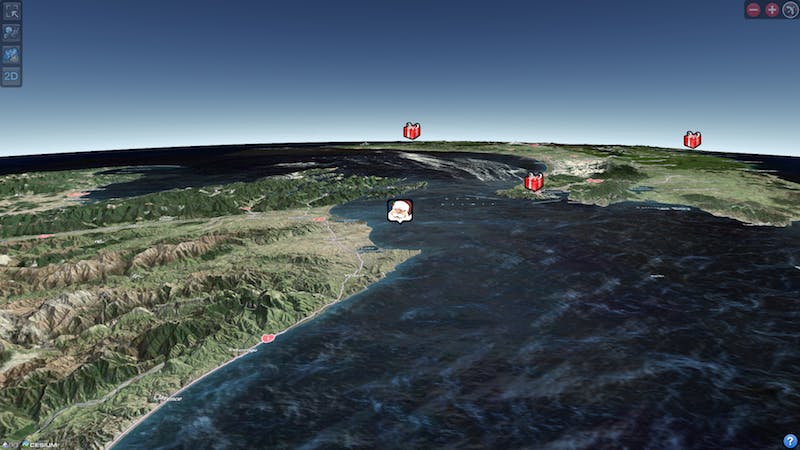
December 2012 - NORAD Tracks Santa: AGI used Cesium to develop the 3D Santa-tracking map for NORAD Tracks Santa. For the first time ever, millions of users enjoyed 3D Santa-tracking without a plugin.
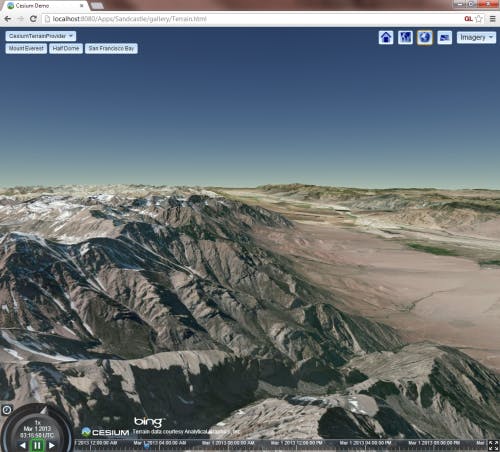
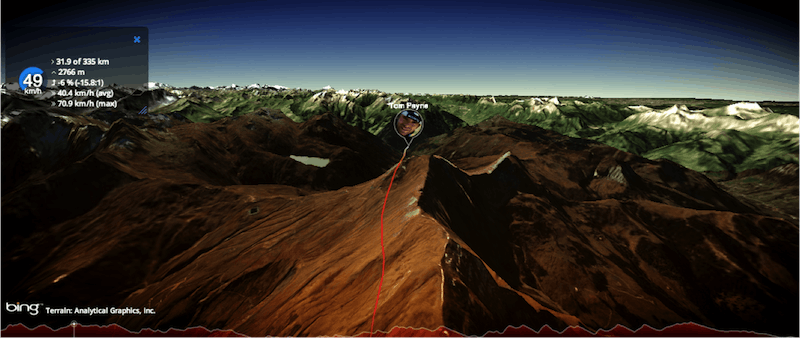
March 2013 - Terrain: Cesium b14 was released with support for global high-resolution terrain and animated water. However, this was not the first time we saw terrain; an early version was used in NORAD Tracks Santa 2012 (a habit we repeated with 3D models in 2013) and was shown at the SIGGRAPH WebGL BOF the previous August.
March 2014 - 3D models: Cesium b26 was perhaps our biggest release since the initial release. This included support for 3D models using glTF, an open-standard on which we are working with Khronos. Pre-release versions of 3D models showed in up the past including in VT MAK's WebLVC Simulation Viewer and in the visualization for the Cygnus Mission to the ISS by AGI.

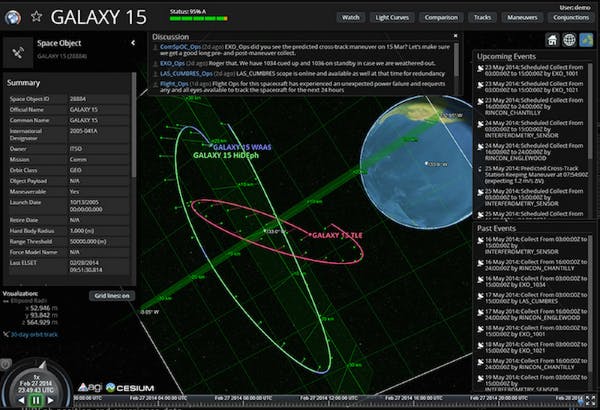
March 2014 - ComSpOC: AGI announced the Commercial Space Operations Center (ComSpOC) for space situational awareness, which uses Cesium for visualization (SSA demo).
April 2014 - STK Terrain Server: AGI announced a new higher-resolution terrain dataset, STK World Terrain, and a product, STK Terrain Server, for using custom terrain data and terrain on closed networks. STK Terrain Server is AGI's first value-add product for Cesium.
August 2014 - Cesium 1.0: After 28 beta releases with contributions from 33 contributors, we are releasing Cesium 1.0 with stable interfaces and improved reference documentation.
Cesium 1.0 is a major milestone as we continue to build Cesium into what we believe is the best virtual globe engine, open- or closed-source, web-based or not.