Display Point Cloud Data from LSD-SLAM in Real Time with LSD-SLAM
Following the disastrous earthquake and tsunami that hit Japan March 11, 2011, helicopters searched for those in need of rescue. However, the tsunami changed the very geography of the land, so rescuers could not locate features on a map, and operations proved extremely difficult. Since then, the R & D department at Northern System Service Co. has developed LSD-SLAM, useful for such cartographical emergencies.
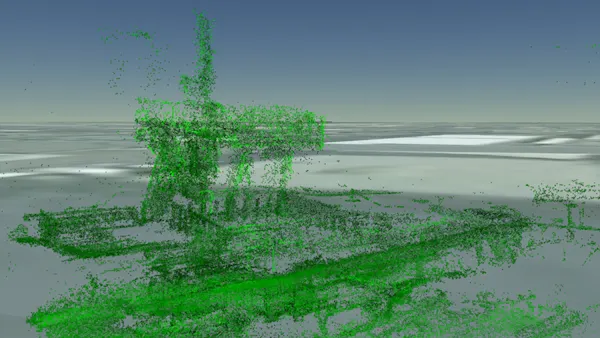
Built on Cesium, LSD-SLAM allows users to create a three-dimensional map from video captured by a drone and to display that map in real time. With SfM (structure from motion) technology, and a lot of time, it’s possible to create an accurate 3D map from photos taken by a drone. However, this can only be achieved after the drone has finished flying. With LSD-SLAM, this is possible in real time.
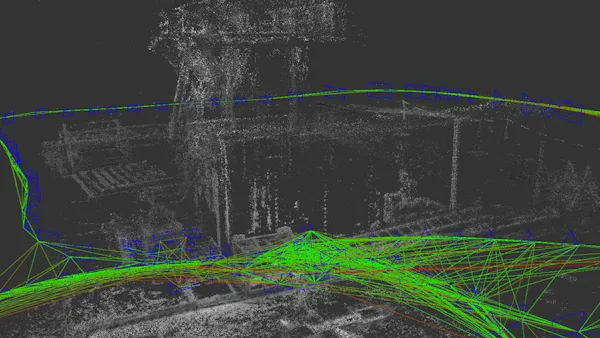
First, users create point clouds by passing real-time video from the drone to LSD-SLAM via ROS. LSD-SLAM stands for ”Large-Scale Direct Monocular Simultaneous Localization and Mapping.” It allows users to create a point cloud map in real time using video taken from a monocular camera. Able to handle large-scale maps, LDS-SLAM is ideal for real-time map creation.
The raw point cloud data output from LSD-SLAM can become very large very quickly. So for LSD-SLAM, an interface program sends point cloud difference data to Cesium in units of key frames. This interface program outputs point cloud difference data, which is then acquired by Cesium to display point cloud data in real time.
Check out the demo video: