Precision Flight Planning for UAVs with Paper Drone Flight Planner
PaperDrone began as an experiment, focused on developing an unmanned aircraft system (UAS) planning application for the purpose of integrating robotic and autonomous aircraft into controlled airspace.
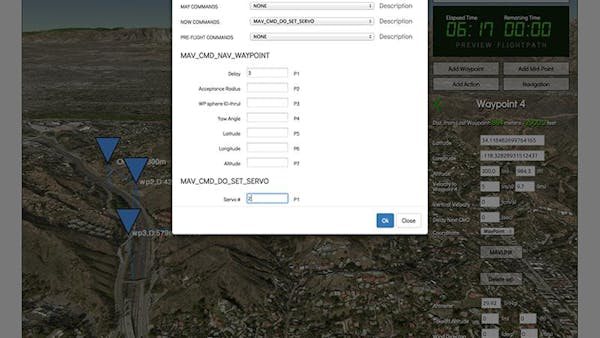
PaperDrone planner seeks to provide a free and stable online planning service to create intricate autonomous flight plans and export them for use by the leading ground control stations using the MAVLINK (Micro Air Vehicle Link) protocol. Exported flight plans can be opened in Mission Planner, APM Planner2, QGroundControl, Andropilot, and more.
PaperDrone supports the popular APM and PX4 open-source Autopilot software and firmware for robotic vehicles.
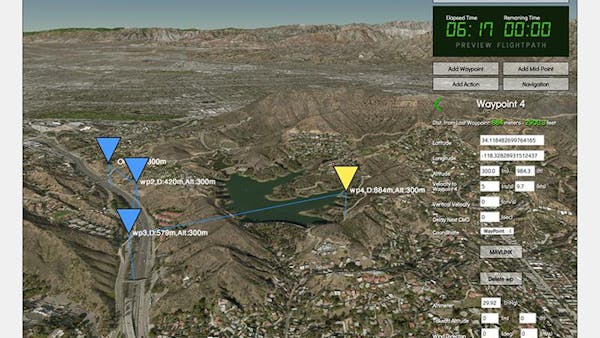

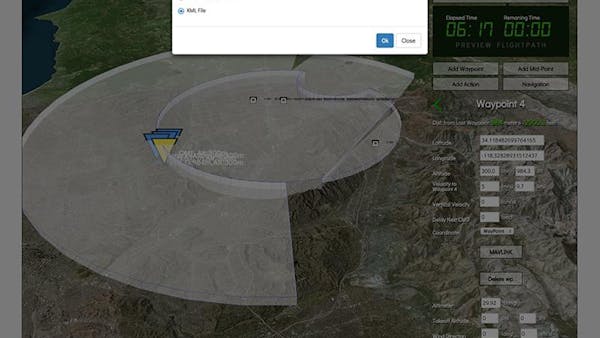
Users can create free accounts and export/import KML files created in PaperDrone Planner for use by other PaperDrone Planner users. Account users can even add their own 3D models, explore airspaces, and export Waypoint mission files for use in popular ground control station applications. PaperDrone users can also export KML tour files for playback in Google Earth.
Check out the demo:
PaperDrone started on Google Earth, and at first used Cesium as just a “backup.” But it’s proven to be much better and faster and produces stunning results. The development community around Cesium is full of very helpful people, and it’s clear this platform is going to bethestandard for online earth-based applications.