Simulate Intersections for Autonomous Driving with RoadRunner and Cesium
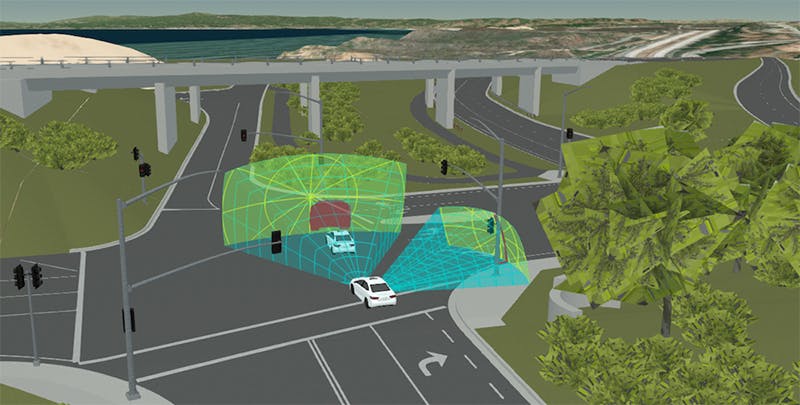
A RoadRunner model imported into Cesium. GIS data credit: U.S. Geological Survey; 3D artist: Tom Vu, VectorZero
Safe autonomous driving requires simulating millions of miles, but not just any miles: simulation efforts should focus on the most interesting road, traffic, pedestrian, weather, and lighting scenarios. Critical scenarios often occur at complex road networks such as intersections and tunnels, which can have compound interconnections, multiple and varying vehicle behavior, and limited and dynamically changing visibility.
Cesium is collaborating with VectorZero to bring complex road networks into Cesium for precise geospatial data fusion and simulation.
VectorZero’s RoadRunner enables users to procedurally author and export detailed interconnected road network models from intersections to tunnels to roundabouts. These models can be imported into Cesium and fused with 3D geospatial content such as terrain to create a high-precision georeferenced autonomous driving simulation environment.
Vehicles can be configured with a sensor array, modeling and fusing each sensor’s geometry for GPU-accelerated time-dynamic visibility analysis.
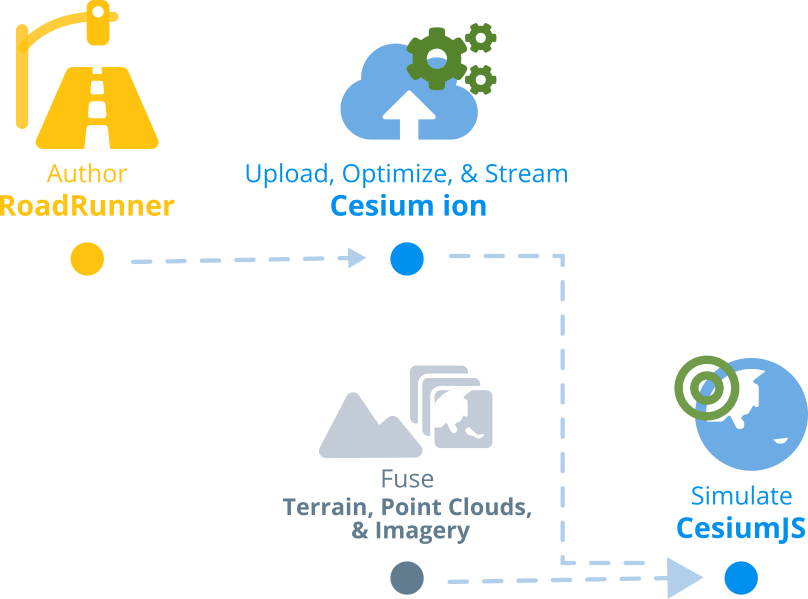
A typical RoadRunner/Cesium workflow is the following:
- Use RoadRunner to author an intersection based on an actual location, aerial imagery, and elevation models. Export the model to an OBJ.
- Use the Cesium ion 3D Tiling Pipeline to convert the OBJ to 3D Tiles, optimizing the model for efficient streaming.
- Upload the optimized 3D tileset to Cesium ion for efficient streaming into a web-based CesiumJS simulation.
Email me at gabby@cesium.com to discuss how Cesium can improve your autonomous driving simulation.