Line of Sight Cesium Arcade Game
We’re excited to introduce the newest variation of our Drone Racing Game.
The Data
We processed AW3D data from our friends at NTT Data for the cities of Chicago, Tokyo, and San Francisco using our upcoming tiling pipeline. The original data consisted of KML and COLLADA files for each city, which we then converted into individual 3D tilesets that could be efficiently rendered in Cesium. We additionally created different courses for each city that are meant primarily to be fun and that also demo various aspects of the rendered data.
Omni Line of Sight
As part of these updates to the game, we added GPU analytic omni-line-of-sight calculations to the drone. Those parts of the buildings that are directly visible by the drone are shaded blue. To showcase the omni-line-of-sight, we updated the user interface to include toggling the omni-line-of-sight on and off, and we allowed the user to “unhook” the camera from the drone to see the full coverage map. With this omni-line-of-sight, selection calculations are done on the GPU in real-time, allowing the user to pick up items, which for our purposes are dynamically animated coins.
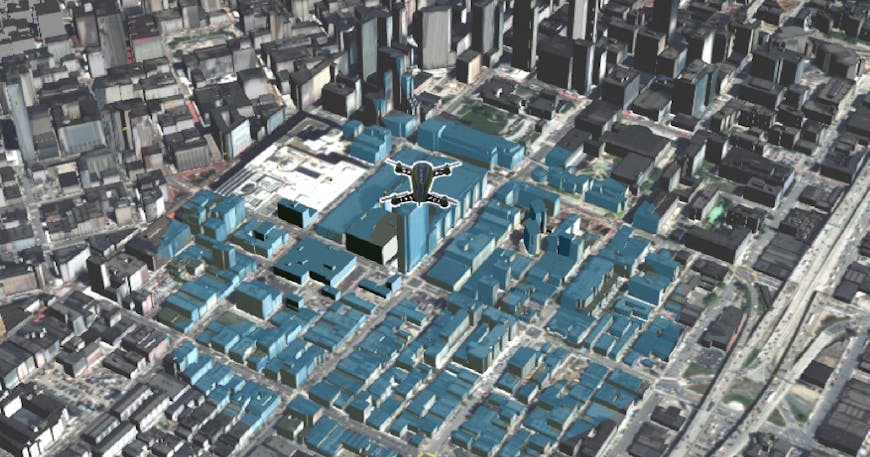
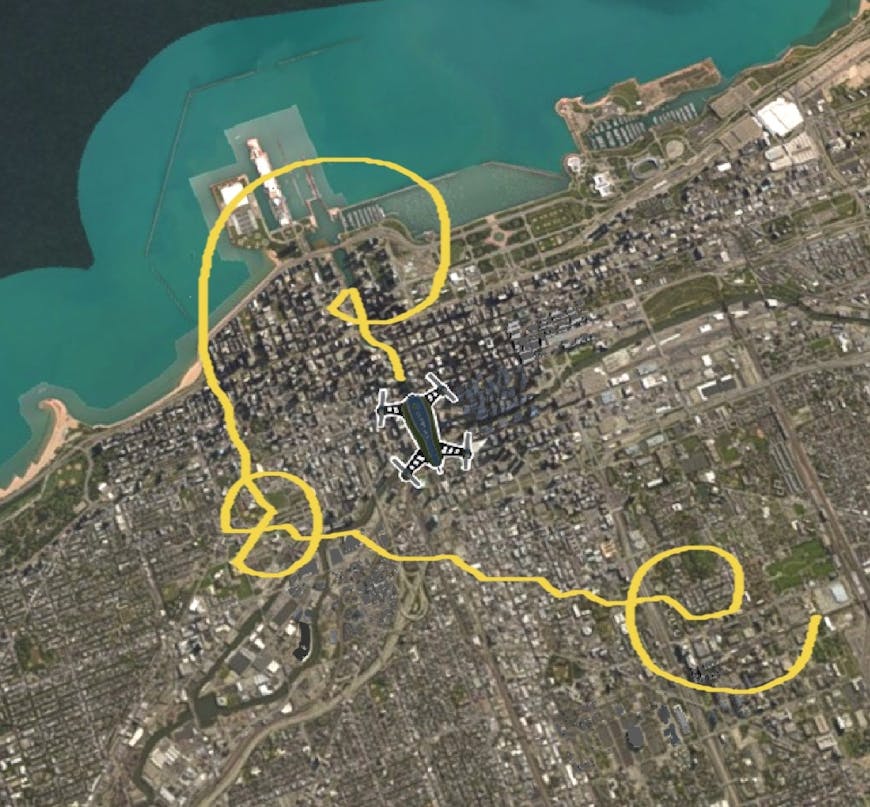
In the Chicago course, most of the buildings were similar in height to those nearby, so this course was arranged so that the user travels between the taller buildings in the area, then zips up and around in circular loops and small zigzag height changes.

Tokyo is the largest 3D tileset of the three and had a lot of ground for the drone to cover, so the track was arranged with small height variation and two main loops, providing the user a more scenic route around the course to see most of the dataset.
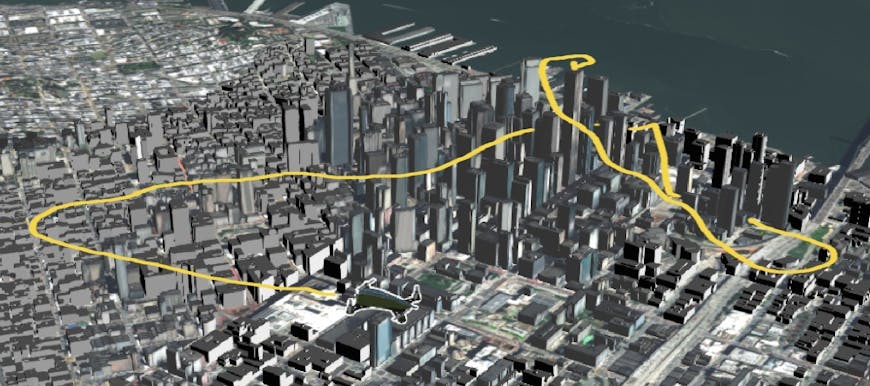
Due to the dramatic difference in building heights, the track for the San Francisco dataset is arranged to weave among the buildings and loop around to ground-level, providing users a more challenging route while also giving them a detailed and up-close flyby of the buildings themselves.