3D Harvesting Planner: Decision-Making Environment for Forestry Management
Mountains in Europe occupy about 35% of the land area and are mostly covered by forests. Forestry operations in mountain areas are seldom performed by a harvester/forwarder system; instead timber is manually felled and extracted by cable cranes. Due to the limits posed by steep terrain conditions, poor road networks, and limited storage and operational room, harvesting and extracting systems are more expensive and less flexible compared to the cut-to-length systems based on wheeled machines, commonly found in flatland forests of EU Nordic countries.
The SLOPE project, funded by the European Union Seventh Framework Programme (FP7/2007-2013) and coordinated by Fondazione GraphiTech, integrates information from remote sensing, Unmanned Aerial Vehicles (UAV), and on-field surveying systems to support macro and local analysis of forest resources. Spatial information is included with multi-sensor data to maintain sustainable forest management and optimize logistics during forest operations. Intelligent technologies in the cable crane/processor head measure data for assessing assortment variety. Traceability systems are coupled to chemometric data, to trace material from the site throughout the supply chain.



Creating a good end-user experience with this huge amount of sensor data, requires a smooth and reactive visualization of the forest content with the highest detail possible. 3D Harvesting Planner is an online system that reveals information about material origin, quality, and availability in real time. 3D Harvesting Planner uses a highly customized version of the Cesium JavaScript Library, called GeoBrowser3D, which offers a 3D OGC compliant solution, integrated with computational and visual techniques for an ideal decision-making environment.
On top of these technologies, specific functionalities for production planning within the mountainous areas have been developed:
- dynamic visualization of digital surface model of the forest parcels as both regular and irregular grid of points,
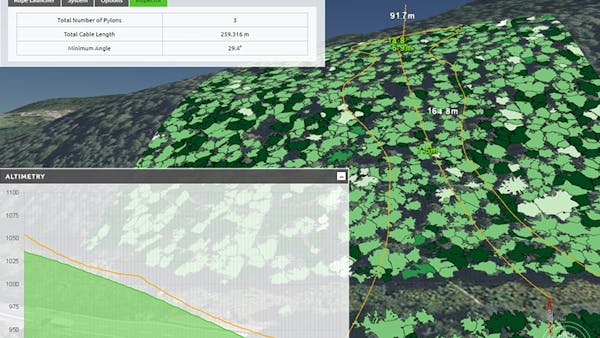
- terrain-based distance and area measurements,
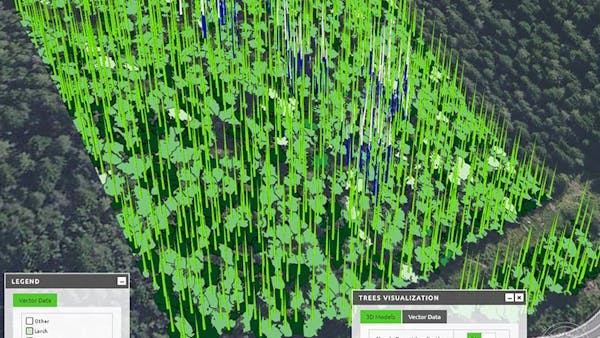
- high detail rendering of tree stems,
- massive rendering of tree stem models of a forest derived from canopy analysis,
- real-time tracking of moving objects for transport monitoring and optimization,
- real-time placement of cable crane lines,
- real-time weather forecast,
- opendata visualization.
The project is currently under development, but the achievements obtained so far indicate that the combination of the standard services to provide information, service-oriented architecture and the WebGL/HTML5 technologies make possible a 3D web-based solutions to visualize, manage, and simulate forestry data and operations.
The following video represents the state-of-the-art of the 3D Harvesting Planner.
You can contact the creators of 3D Harvesting Planner at info@graphitech.it